[Paper Reivew] Flow Matching Gudie and Code-(3. Flow models)
Flow matching의 comprehensive and self-contained reviewd 입니다.
전체 포스팅
3. Flow models
이번 섹션에서는 Flow에 대해 소개합니다. 먼저 간단한 형태의 Flow Matching에서 시작하여, (다음 section에서) Markov process로 일반화하는 과정을 거칩니다. 다음의 사실을 알고 가야합니다.
- Flow는 CTMP의 가장 간단한 형태입니다. 임의의 source 분포에서, 임의의 target 분포로 transform할 수 있습니다.
- ODE의 solution을 approximation 하는 것 대신에 flow는 sampling 될 수 있습니다.
- Deterministic한 방식으로 unbiased model likelihood estimation이 가능합니다.
3.1. Random vectors
(생략)
3.2. Conditional densities and expectations
(생략)
3.3. Diffeomorphisms and push-forward maps
생략...하십쇼
\( C^r(\mathbb{R}^m, \mathbb{R}^n) \)을 \( r \)-차 미분 가능한 연속 함수 \( f : \mathbb{R}^m \rightarrow \mathbb{R}^n \)들의 집합이라 정의하면, Diffeomorphism (미분동형사상)이란 역함수도 \( r \)-차 미분 가능한 가역함수 들의 집합을 의미합니다.
Details
3.4. Flows as generative models
반복하지만 Generative model의 목표는
- Source 분포 \(p\)로 부터의 sample \(X_0 = x_0\) \(\to\) Target 분포 \(q\)의 sample \(X_1 = x_1\)으로 transform 하는 것!
Flow model은 continuous-time Markov process \((X_t)_{0\leq t \leq 1}\) 이며, RV \(X_0\)에 flow \(\psi_t\)를 적용해, 최종적으로 \(t = 1\)일 때 Target distribution으로 가도록 합니다.
\[X_t = \psi_t(X_0), \quad X_0 \sim p, \,\text {s.t.} \quad X_1 = \psi_1(X_0)\sim q\]Markov Proof
\( C^r \) flow란 시간 \( t \)에 따라 입력 \( x \)를 변환하는 mapping \( \psi_t: [0, 1] \times \mathbb{R}^d \to \mathbb{R}^d \)인데, \( \psi_t \)가 \( t \in [0, 1] \) 안에서 \( C^r \)-diffeomorphism인 것을 말합니다. 임의의 \( 0 \leq t < s \leq 1 \)에 대해서 다음을 만족합니다:
3.4.1 Equivalence between flows and velocity fields
결론만 전달하자면 \(C^r\) flow와 \(C^r\) velocity field \(u_t\)는 동일합니다.
직관적으로 이해하자면
- Flow: 시간에 따라 상태를 변환하는 전체 궤적.
- velocity field: 특정 시간에서의 순간적인 변화율.
Flow로부터 velocity field를 얻으려면 시간 변화율 계산해야 하고, Velocity field로부터 flow 얻으려면 ODE를 풀어야합니다.
\[u_t(x) = \dot{\psi}_t\left(\psi_t^{-1}(x)\right),\]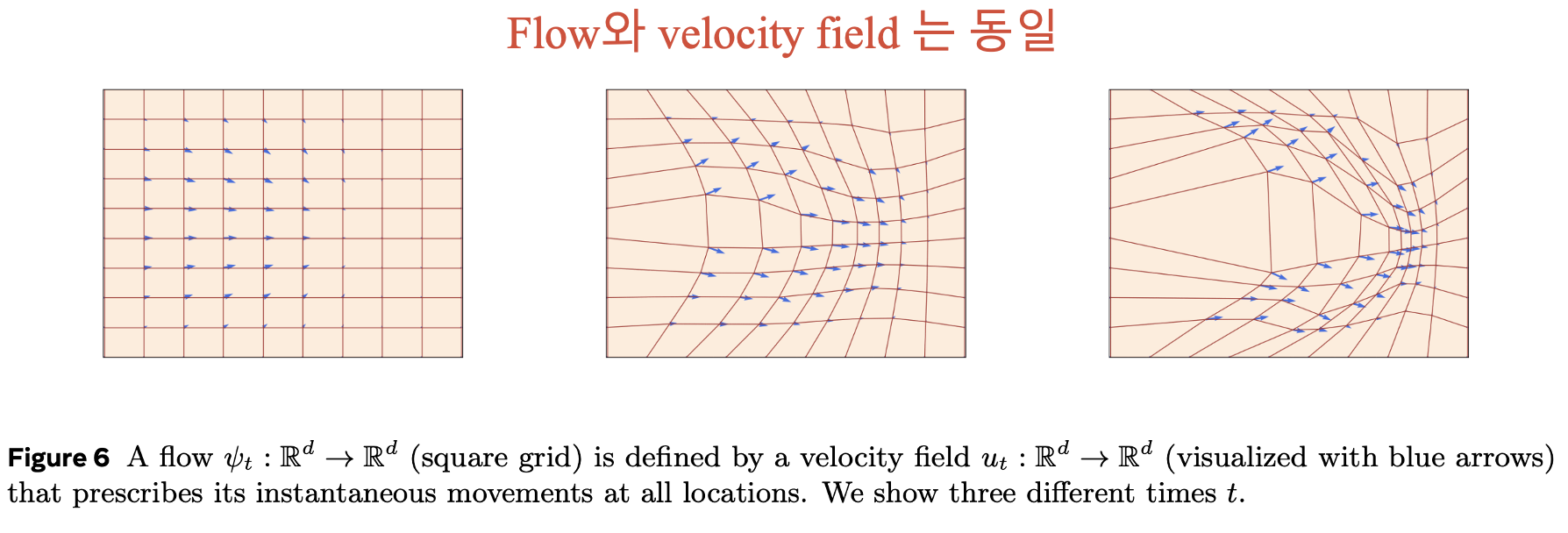
3.4.2. Computing target samples from source samples
Target sample \(X_1\) (일반화하자면 \(X_t\))를 계산하기 위해서는 \(X_0 = x_0\)에서 시작해, \(u_t^\theta\)를 가지고, ODE를 Numerically 풀면 됩니다.
그 중 하나의 예시가 Euler Method.
Euler method
간단한 방법 중 하나는 Euler method입니다. (참고: Code 1에서는 second-order midpoint method 사용)
- Euler Method는 각 시간 스텝 \( h \)에서 \( o(h) \) 크기의 오류를 포함합니다.
- \( n = 1/h \) 스텝 동안 총 누적 오류는 \( o(1) \)이 되며, \( h \to 0 \)으로 스텝 크기를 줄이면 이 오류는 사라집니다.
3.5. Probability paths and the Continuity Equation
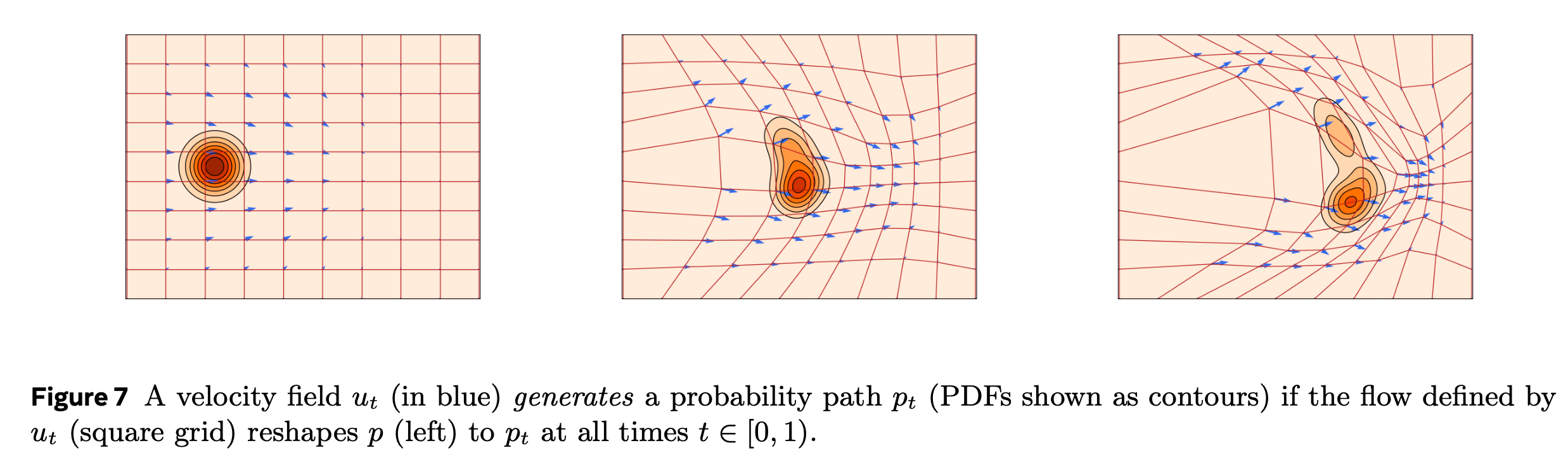
Time-dependent probability \((p_t)_{0 \leq t \leq 1}\)을 probability path라 합니다. 지금 상황에서 중요한 probability path는 flow model \(X_t = \psi_t(X_0)\)의 marginal \(\text{PDF}\) 이며, push-forward 공식을 통해 표현할 수 있습니다.
\[p_t(x) = [\psi_{t\sharp} p](x).\]임의의 probability path, \(p_t\)로 부터, 다음을 정의합니다.
\[u_t \color{blue}{\textbf{ generates }} \color{black}p_t \text{ if } X_t = \psi_t(X_0) \sim p_t \text{ for all } t \in [0, 1).\]이 방식으로, 우리는 velocity field, 그것들의 (equivalent) flow, generated probability path의 관게를 정립할 수 있습니다.
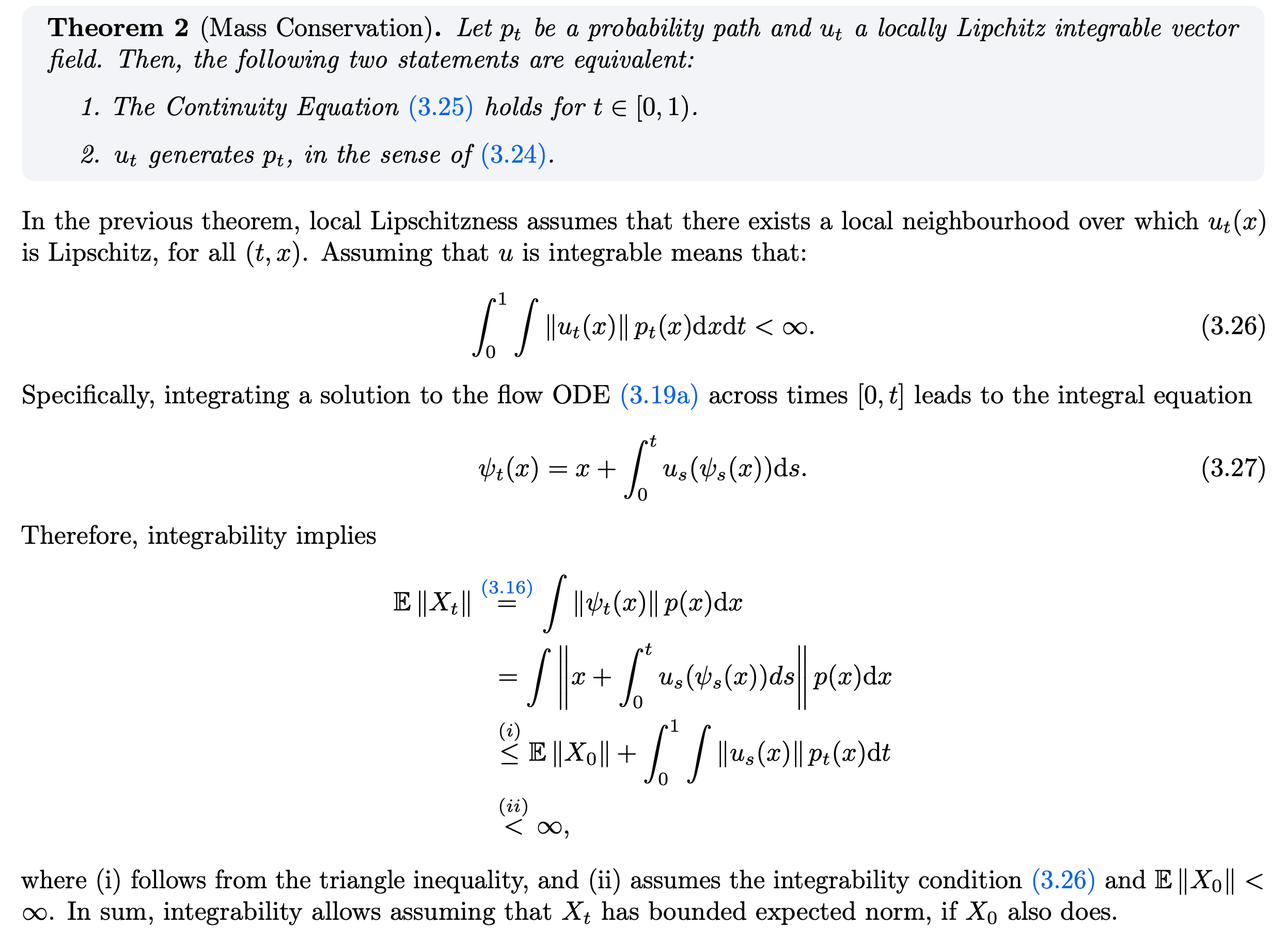
또한 다음 두 문장은 equivalent합니다.
- \(\color{black} \text{Continuity Equation } \frac{d}{dt} p_t(x) + \operatorname{div}(p_t u_t)(x) = 0 \text{ holds for all } t \in [0, 1)\).
- \(\color{black} u_t \color{blue}{\textbf{ generates }} \color{black}p_t \text{ if } X_t = \psi_t(X_0) \sim p_t \text{ for all } t \in [0, 1)\).
Proof
\( u_t \)가 \( p_t \)를 generate하는 것을 보이려면 \( (u_t, p_t) \)가 Continuity Equation을 만족함을 보이면 됩니다.
Divergence Theorem
Smooth vector field \( u : \mathbb{R}^d \to \mathbb{R}^d \)에 대해, 영역 \( D \) 내부에서의 divergence를 적분한 값은 영역 경계 \( \partial D \)를 빠져나가는 flux와 같습니다.
Divergence theorem을 이용해 integral-form으로 바꾸면 몇 가지 insights를 얻을 수 있습니다:
이를 해석하자면:
- 좌변은 영역 \( D \) 내부의 확률 질량의 변화율(시간적 변화)을 나타냅니다.
- 우변은 domain을 빠져나가는 probability flux를 나타냅니다.
- probability flux \( j_t(y) = p_t(y) u_t(y) \)는 확률 밀도 \( p_t(y) \)와 velocity field \( u_t(y) \)의 곱으로 정의되며, 이는 "확률 질량이 이동하는 방향과 크기"를 나타냅니다.
3.6. Instantaneous Change of Variables
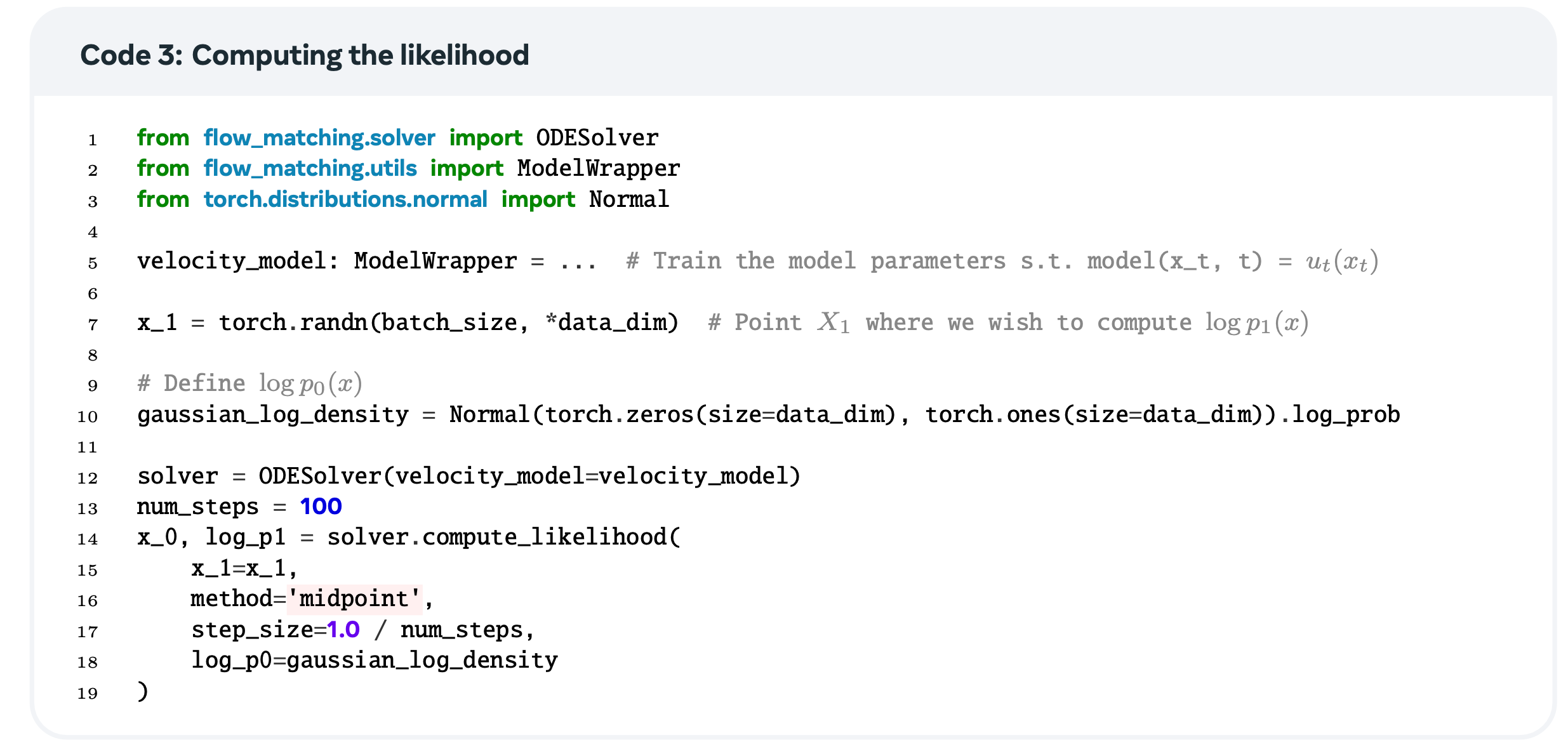
Flow model을 사용하는 주요 장점 중 하나는 exact likelihood를 계산할 수 있다는 것입니다. 이는 Instantaneous Change of Variables라 불리는 Continuity Equation의 결과 덕분이라고 합니다.
\[\frac{d}{dt} \log p_t(\psi_t(x)) = -\text{div}(u_t)(\psi_t(x)),\]위 식은 Flow ODE에 의해 정의되는 \(\psi_t(x)\)를 따라 샘플링하는 log-likelihood를 governing하는 ODE입니다. 하지만 이를 위해서는 ODE를 backward in time으로 simulation하는 과정이 필요합니다.
Log-Likelihood Estimation
Hutchinson's Trace Estimator를 사용해 근사하여, unbiased log-likelihood estimator를 얻습니다.
\(\text{div}(u_t)(\psi_t(x))\) 계산과 다르게, 위 식을 계산하려면 vector-Jacobian product (JVP)를 통한 single backward pass를 이용해 계산할 수 있다고 합니다.
따라서 정리하자면, log-likelihood를 계산하기 위해 \( t =1 \to 0 \)로 ODE를 simulation하면 됩니다:
최종적으로 다음을 얻습니다:
3.7. Training flow models with simulation
위 결과식을 이용해서, training data의 log-likelihood를 최대화하도록 flow model을 학습할 수 있습니다.
\[p_1^\theta \approx q\]가 되도록 \(u_t^\theta\)를 학습하고자 하는데, 이는 KL-divergence등을 이용해 구현할 수 있습니다.
\[\mathcal{L}(\theta) = D_{\text{KL}}(q, p_1^\theta) = -\mathbb{E}_{Y \sim q} \log p_1^\theta(Y) + \text{constant}.\]하지만 이 손실 함수와 그 gradient를 계산하려면, 훈련 과정에서 정확한 ODE 시뮬레이션이 필요합니다.
이와는 다르게, Flow matching은 simulation-free framework를 제공한다고 합니다.
Summary
정리하자면…
- Flow model은 CTMP \(X_t\) 이며, \(\text{RV } X_0\)에 flow \(\psi_t\)를 적용해, 최종적으로 \(t = 1\)일 때 Target distribution으로 가도록.
- Velocity field \(u_t\)는 flow의 순간 변화율, ODE를 통해 flow와 상호 변환이 가능.
- Log-likelihood를 정확히 계산할 수 있지만, simulation이 필요.
- Source sample에서 target sample을 계산하려면 ODE 를 Numerically 풀어야 함!